LiDAR VNS System Should Make Docking Spacecraft At ISS
Easier
 For the past two years, NASA engineers and contractors have
worked together to develop a technology that would make it easier
for future space vehicles to dock to the International Space
Station. Their solution, the Vision Navigation Sensor (VNS) will be
tested on the STS-134 mission scheduled for July.
For the past two years, NASA engineers and contractors have
worked together to develop a technology that would make it easier
for future space vehicles to dock to the International Space
Station. Their solution, the Vision Navigation Sensor (VNS) will be
tested on the STS-134 mission scheduled for July.
Developed by the Orion Project Office at NASA's Johnson Space
Center in Houston, the VNS, as well as a docking camera, have the
ability to advance the capability necessary for automated
rendezvous and docking. The system is a part of the Sensor Test for
Orion Relative Navigation Risk Mitigation (STORRM) Development Test
Objective.
"The VNS is the most advanced relative navigation sensor that
has been developed for spaceflight in support of rendezvous and
docking," said Howard Hu, manager of Orion vehicle system
performance and analysis at Johnson. "The Orion Project is excited
to help NASA advance this technology and looks forward to
validating its performance using the space shuttle and the ISS
environment."
The first element of that technology - five retro-reflectors
designed by NASA Langley Research Center in Hampton, VA. - will
launch on space shuttle mission STS-131 Monday, April 5. The
retro-reflectors - which are made from reflective material similar
to that on stop signs - are specialized reflectors that reflect
light back with a minimum scattering of light. They will serve as
the targets for the VNS.
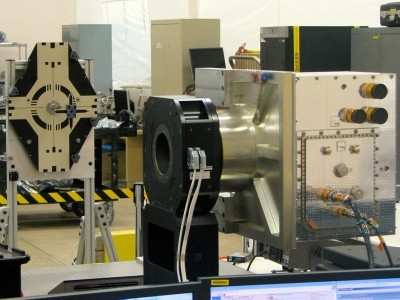
STORRM Sensor Photo Courtesy
NASA
The VNS is an eye-safe flash light detection and ranging, or
LiDAR, system that provides an image of the target, in this case
the space station - along with range and bearing data to precise
accuracies. The docking camera is designed to provide high
resolution, color images. "The new vision navigation system that is
being tested would make it easier for the astronauts during docking
operations and give them more information earlier on about where
they are in proximity to the ISS, on the order of centimeters,"
said Audra Bullock, the reflective elements lead at NASA
Langley.
"The sensor provides two to three times more range capability
than any other space LiDAR system today," added Heather Hinkel, the
STORRM principal investigator at Johnson. "Having one sensor that
can give high-accuracy navigation information to a crew member, or
an automated guidance, navigation and control system, from three
miles away to within seven feet is unprecedented."
On shuttle mission STS-134 planned for July, the new system will
be demonstrated during docking, undocking and re-rendezvous
operations. Data will be collected and the crew will be able to
monitor the data through a STORRM software application on the
shuttle computer. In addition, screen snapshots of the data will be
sent to Mission Control at Johnson by slow scan video for the
STORRM team to evaluate the data real time.
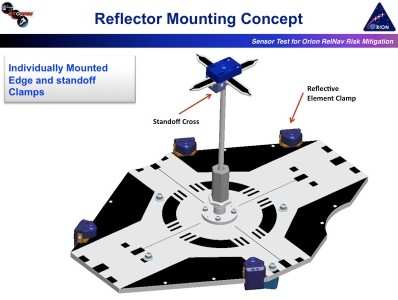
STORRM Mounting Concept Image Courtesy
NASA
Under direction of the Orion Project office, teams from NASA
Langley, NASA Johnson, and industry partners Lockheed Martin and
Ball Aerospace worked together in a short time to develop and test
the prototype to support the STORRM Development Test Objective.
Engineers at Langley are responsible for engineering management,
design and build of the avionics, DTO computer hardware and
reflective elements. They are also responsible for the integration,
testing and certification of these components. NASA Johnson is
responsible for program management, technology evaluation, flight
test objectives, operational concepts, contract management and data
post-processing. Industry partners Lockheed Martin Space Systems
and Ball Aerospace Technology Corporation are responsible for the
design, build and testing of the VNS and docking camera.
 ANN's Daily Aero-Term (09.17.24): Instrument Approach Procedure (IAP) Charts
ANN's Daily Aero-Term (09.17.24): Instrument Approach Procedure (IAP) Charts

