Thu, Jul 25, 2013
Traveled Over 100 Yards, Doubling Previous Best Effort
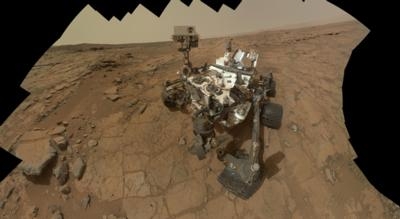
NASA's Mars rover Curiosity drove twice as far on July 21 as on any other day of the mission so far: 109.7 yards. The length of the drive took advantage of starting the 340th Martian day, or sol, of the mission from a location with an unusually good view for rover engineers to plan a safe path. In weeks to come, the rover team plans to begin using "autonav" capability for the rover to autonomously navigate a path for itself, which could make such long drives more frequent.

Curiosity is about three weeks into a multi-month trek, from the "Glenelg" area where it worked for the first half of 2013, to an entry point for the mission's major destination: the lower layers of Mount Sharp. The mission's longest one-day drive prior to July 21 was about 54 yards, on Sol 50 (Sept. 26, 2012). After completing the longer drive, Curiosity drove 68.2 yards on July 23 (Sol 342), bringing the mission's total driving distance so far to 0.81 mile.
The Sol 340 drive included three segments, with turns at the end of the first and second segments. Rover planners used information from stereo imaging by the Navigation Camera (Navcam) on Curiosity's mast, plus images from the telephoto-lens Mast Camera (Mastcam). The drive also used the rover's capability to use imagery taken during the drive to calculate the driving distance, a way to verify that wheels have not been slipping too much while turning.
"What enabled us to drive so far on Sol 340 was starting at a high point and also having Mastcam images giving us the size of rocks so we could be sure they were not hazards," said rover planner Paolo Bellutta of NASA's Jet Propulsion Laboratory. “We could see for quite a distance, but there was an area straight ahead that was not clearly visible, so we had to find a path around that area."
The rover was facing southwest when the sol began. It turned slightly more to the west before driving and used visual odometry to be sure it drove the intended distance (about 55 yards or 50 meters) before turning back farther southward. The second leg, next turn, and third leg completed the drive without visual odometry, though the rover was using another new capability: to turn on visual odometry autonomously if tilt or other factors exceed predetermined limits.
New software on Curiosity gives it the capability to use visual odometry through a range of temperatures. This was needed because testing this spring indicated the Navcam pair linked to the rover's B-side computer is more sensitive to temperature than anticipated. Without the compensating software, the onboard analysis of stereo images could indicate different distances to the same point, depending on the temperature at which the images are taken. The rover was switched from its A-side computer to the redundant B-side computer on Feb. 28 due to a flash-memory problem -- subsequently resolved -- on the A-side. The Navcam pair linked to the A-side computer shows less variability with temperature than the pair now in use.
"For now, we're using visual odometry mostly for slip-checking," said JPL's Jennifer Trosper, deputy project manager for Curiosity. "We are validating the capability to begin using autonav at different temperatures."
The autonomous navigation capability will enable rover planners to command drives that go beyond the route that they can confirm as safe from previous-sol images. They can tell the rover to use the autonomous capability to choose a safe path for itself beyond that distance.
Curiosity landed at the "Bradbury Landing" location within Gale Crater on Aug. 6, 2012, EDT and Universal Time (Aug. 5, PDT). From there, the rover drove eastward to the Glenelg area, where it accomplished the mission's major science objective of finding evidence for an ancient wet environment that had conditions favorable for microbial life. The rover's route is now southwestward. At Mount Sharp, in the middle of Gale Crater, scientists anticipate finding evidence about how the ancient Martian environment changed and evolved.
(Images provided by NASA)
More News
Very High Frequency The frequency band between 30 and 300 MHz. Portions of this band, 108 to 118 MHz, are used for certain NAVAIDs; 118 to 136 MHz are used for civil air/ground voi>[...]
Aero Linx: Aviation Suppliers Association Established February 25, 1993, the Aviation Suppliers Association (ASA), based in Washington, D.C., is a not-for-profit association, repre>[...]
Have A Story That NEEDS To Be Featured On Aero-News? Here’s How To Submit A Story To Our Team Some of the greatest new stories ANN has ever covered have been submitted by our>[...]
From 2021 (YouTube Version): Colorado Campus Offers aVariety Of Aerospace Entertainment And Education Wings over the Rockies Exploration of Flight is the second location for the Wi>[...]
Also: Paramotor Champ's, Electric Ultralight, ICON BK Update, Burt Rutan at Oshkosh! The Popular Rotorcraft Association is reaching out for help in rebuilding their private runway >[...]
 ANN's Daily Aero-Term (05.17.24): Very High Frequency
ANN's Daily Aero-Term (05.17.24): Very High Frequency

