Thu, Sep 08, 2016
Open Source Sense-And-Avoid Development Technology For Drone Kits
Parrot has rolled out an open development kit for the design of advanced applications for autonomous navigation, obstacle avoidance, indoor navigation and 3D mapping for drones and other robotic platforms in environments with multiple barriers and where GPS signals are not available.
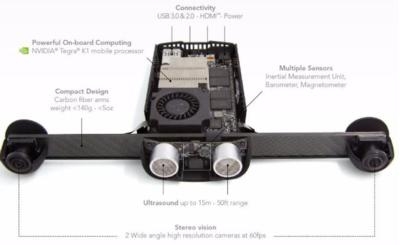
Parrot S.L.A.M.dunk integrates advanced software applications based on a Simultaneous Localization and Mapping algorithm: S.L.A.M. S.L.A.M. technology enables the drone to understand and map its surroundings in 3D and to localize itself in environments with multiple barriers and where GPS signals are not available. With an embedded NVIDIA Tegra K1 processor, Parrot S.L.A.M.dunk allows implementation of the latest algorithms of computer vision and autonomous navigation that are optimized for NVIDIA® GPU. In addition, the Parrot S.L.A.M.dunk is optimized to minimally impact the battery life of the drone.
Parrot S.L.A.M.dunk integrates several sensors:
- A fish-eye stereo camera with a 1500x1500 resolution at 60fps
- An Inertial Measurement Unit (IMU)
- An ultrasound sensor
- A magnetometer
- A barometer

Parrot developed S.L.A.M.dunk to be as easy and user-friendly as possible for developers, researchers, integrators and academics. Sensors and algorithms are fully integrated in order to speed the design of advanced applications for drones and robotic platforms. All Ubuntu functionalities and benefits from ROS (Robot Operating System) framework are embedded in the Parrot S.L.A.M.dunk making it user-friendly. The HDMI port makes it possible to develop directly on the product.
Parrot S.L.A.M.dunk can be used for:
- Prototyping of drones and robotic solutions
- autonomous navigation of drones and robots
- 3D mapping
- Stereo camera and a sensor array (IMU, barometer, magnetometer, ultrasound)
Weighing less than 4.9oz, Parrot S.L.A.M.dunk fits on various types of Linux-based drones and robotic platforms including quadcopters and fixed-wings, rolling robots and articulated arms, with the help of mount kits. Once placed, Parrot S.L.A.M.dunk should be linked to the battery of its host-drone by a 3.5mm jack cable and a USB cable in order to send and receive information and commands to and from the drone. Developed by robotic researchers for robotic researchers, Parrot S.L.A.M.dunk is a ready-to-use module that will accelerate the development of tomorrow’s application for drones and robotic platforms.
(Images provided with Parrot news release)
More News
An Amazing Experience Awaits The Chosen Few... Oshkosh, to us, seems the perfect place to get started on watching aviation recover the past couple of years... and so ANN is putting>[...]
“NBAA has a tremendous responsibility to the business aviation industry, and we are constantly collaborating with them. Our flight departments, professionals and aircraft own>[...]
Dead Reckoning Dead reckoning, as applied to flying, is the navigation of an airplane solely by means of computations based on airspeed, course, heading, wind direction, and speed,>[...]
Aero Linx: Vertical Aviation Safety Team (VAST) We are a public–private initiative to enhance worldwide flight operations safety in all segments of the vertical flight indust>[...]
We're Everywhere... Thanks To You! Even with the vast resources and incredibly far-reaching scope of the Aero-News Network, every now and then a story that should be reported on sl>[...]
 ANNouncement: Now Accepting Applications For Oshkosh 2024 Stringers!!!
ANNouncement: Now Accepting Applications For Oshkosh 2024 Stringers!!!

